2010年11月25日
増幅器
目次
増幅器の基礎
理想増幅器
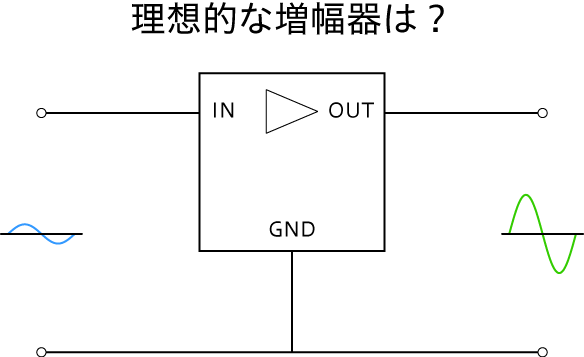
理想的な増幅器とはどのような特性だろうか?
増幅器に入ってきた電位を正確に測定し、指定した率で増幅して、どのような負荷が付いていようと安定して出力できる回路が理想となる。 そのような理想増幅器は、入力と出力の関係と増幅が次のよう定義される。
- 入力端子:入力インピーダンスが無限大
- 出力端子:出力インピーダンスがゼロ
- 増幅特性:無限に増幅できる
- 周波数特性:周波数に影響されない
- 雑音特性:ノイズがのらない
理想的な増幅回路を式で示すと、入力電圧Vinを一定の増幅率(利得)Aをかけて出力電圧Voutを出力する次式となる。
$$ V_{out} = A \cdot V_{in} $$
入力端子:入力インピーダンスが無限大
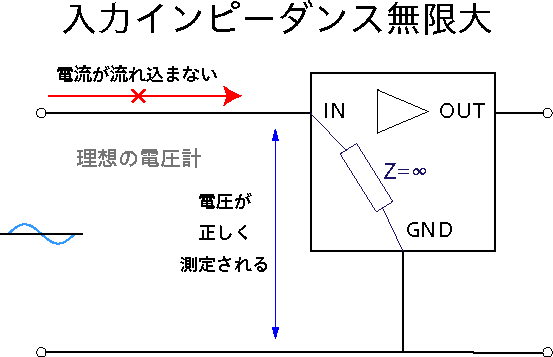
入力端子は、+と-の2端子で電圧を測定する役割をはたしている。理想的な電圧測定を考えると、電圧計と同じ特性で、電圧を正しく測定できる。電力を消費しない(電流を流さない)。の2点となる。これを言い換えると、抵抗が無限大となり、周波数特性も考えインピーダンスが無限大と言う。さらに入力端子のインピーダンスであるから、「入力インピーダンスが無限大」が理想の入力端子となる。
インピーダンスが無限大とは、入力端子に電圧が印加されても、\(I = V / R(\infty)\)で、電圧に関係なく電流が0となる、電流が流れ込まない回路となる。 入力インピーダンスが無限大になると、どんなに微少な電流であっても、電流が流れないため電圧を測定できる。
出力端子:出力インピーダンスがゼロ
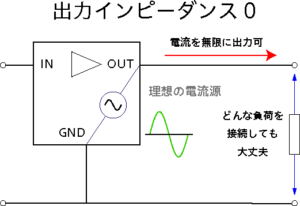
出力端子の理想は、負荷に関係なく決められた出力ができることである。 無限の電力を出力可能な電源の特性と同じで、出力インピーダンスが0の電源回路となる。 出力インピーダンスが0になると、電流を流しても内部でエネルギー消費が無いため、出力負荷がどんなに低いインピーダンスであっても電圧を印加し電流を流すことができる。
増幅特性:無限に増幅できる
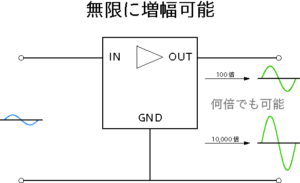
増幅特性の理想は、入力信号を無限倍に増幅して出力信号にできることである。この無限に増幅できるとは、1千倍でも1万倍でも指定した倍率(増幅率)で増幅でき、安定して動作する増幅器となる。
周波数特性:周波数に影響されない
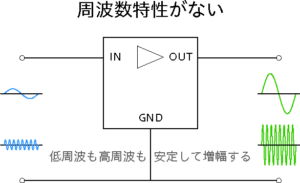
周波数特性は、低周波から高周波までどんな入力信号であっても、同じ増幅率で安定して増幅される回路が理想となる。これを周波数特性がない増幅回路といい、1Hzでも10GHzであっても同じように増幅できる増幅器となる。
雑音特性:ノイズがのらない
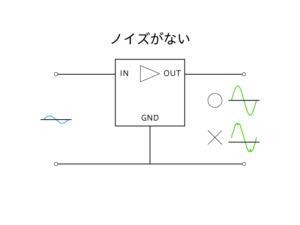
雑音特性は、出力信号に意図しない信号が入らない、ノイズがのらないことが理想となる。 ノイズがのらないことは、どのような微少電圧であっても増幅したのちの出力信号に、本来の電圧以外に出力されないことである。
オーディオなどで、大きな音にすると「サー」と小さな音が鳴る場合があるが、これをノイズといい、本来の音以外の信号が出力されている。このような現象が発生しないことが理想的である。
増幅率の制御
負帰還増幅回路
理想的な増幅回路である、利得が安定しており各種特性が良い増幅回路を作成するには高度な設計・実装技術が必要となる。そのため、任意の利得にあわせた増幅回路を製作することはコストが高いなど問題がある。そこで、特性がよく充分に利得が大きい増幅器を開発し、簡単な外部回路で利得を固定する負帰還増幅技術を用いることで、簡単に任意の利得の増幅回路を作成することができる。
実際の増幅器(トランジスタなど)の素子は、製造状態により素子自体の利得にばらつき(1000倍の物や1005倍の物)が発生したり、周波数によって増幅特性が変わり、低周波では1000倍増幅されるが高周波では10倍しか増幅されないなどの歪みが発生する。そのため、増幅器の特性を最大限に用いた(無限大)の増幅を行うのではなく、一定の倍率を設定して増幅しなければ安定した利得を得ることができないため、外部素子で増幅率を固定した増幅回路を作成する必要がある。また、外部回路も抵抗やコンデンサのように安定した素子を用いる。
増幅率を固定する方法として、負帰還(ネガティブフィードバック)増幅回路がある。これは、図2のような回路で、出力電圧Voutを一定の減衰Bをかけて位相を反転させた電位を入力電圧に帰還(フィードバック)させた回路である。
この回路は、入力電圧 Vin と、出力電圧Vout、増幅器(α回路)と減衰器(β回路)があり、増幅器の利得をAとし、減衰器の減衰率(利得)をBとする。 増幅器に入力される電圧Viの前には電圧合成器があり、入力電圧Vinと減衰器出力Vβの逆位相を合成した電圧が入力される式(2)となる。
\(V_i = V_{in} – V\beta \cdots (2)\)増幅器に入力される電圧Viに増幅器利得Aをかけた電位が出力電圧Voutとなり式(3)となる。
\(V{out} = V_{i} \times A \cdots (3)\)出力電圧Voutは、減衰器を通して減衰器利得Bをかけた電圧がVβの式(4)が帰還(フィードバック)される。
\(V\beta = V_{out} \times B \cdots (4)\)式(2)・(3)・(4)を整理すると次の式(5)になる。
\(V_{out} = V_{i} \times A \\ = ( V_{in} – V\beta ) \times A \\ = ( V_{in} – V_{out} \times B ) \times A \\ = V_{in} \times A – V_{out} \times B \times A \\ V_{out} + V_{out} \times B \times A = V_{in} \times A \\ V_{out} ( 1 + B \times A ) = V_{in} \times A \\ ∴ V_{out} = V_{in} \times A / ( 1 + B \times A ) \cdots (5)\)式(5)の増幅器利得Aを∞とすると式(6)となる。
limA → ∞ Vout = limA → ∞ ( A / ( 1 + B × A ) ) × Vin = limA → ∞ ( 1 / ( 1 / A + B) ) × Vin ∴ limA → ∞ Vout = ( 1 / B ) × Vin …(6)
式(6)から、充分に増幅器の利得が大きい場合に出力Voutは、減衰器の利得Bの逆数を入力Vinにかけた値となる。このことから、この回路全体の利得Gは、減衰利得Bの逆数で決まることがわかり式(7)となる。
Gain = 1 / B …(7)
このように、充分に利得が大きい増幅器に、減衰器を取り付けて負帰還(逆位相)で入力に戻すことで、任意の利得の増幅器を作ることができる。
また、負帰還の増幅回路により任意の利得の増幅回路を作成したが、正帰還の増幅回路を作成すると、増幅した信号を再増幅するため発振回路を作ることができる。
差動増幅器
差動増幅器とは、V+とV-の二つの入力があり、入力電圧Viを、増幅率A倍に増幅する増幅器のことである。
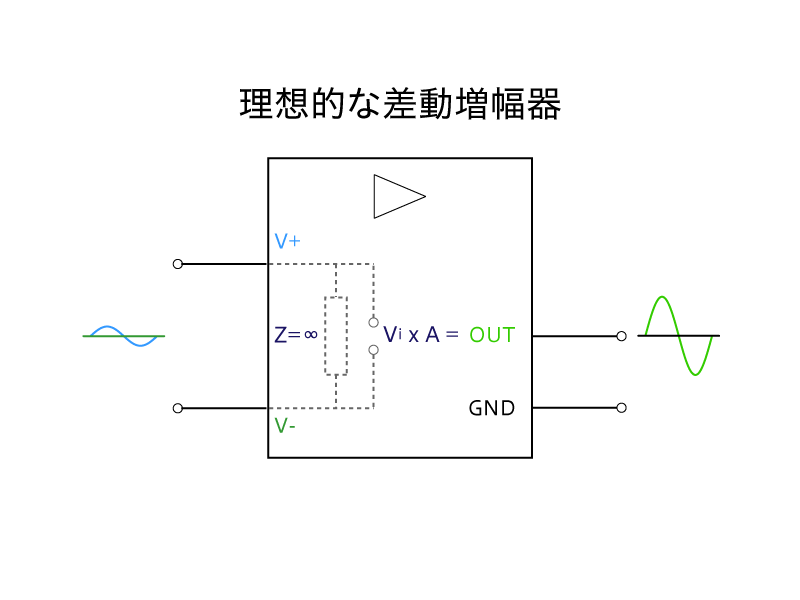
$$ V_{out} = A \times ( V_{+} – V_{-} ) \\ = A \times V_{in} $$
入力信号をGND(0V)を基準電圧した増幅回路を作る場合は、V-をGNDに接続すればよい。
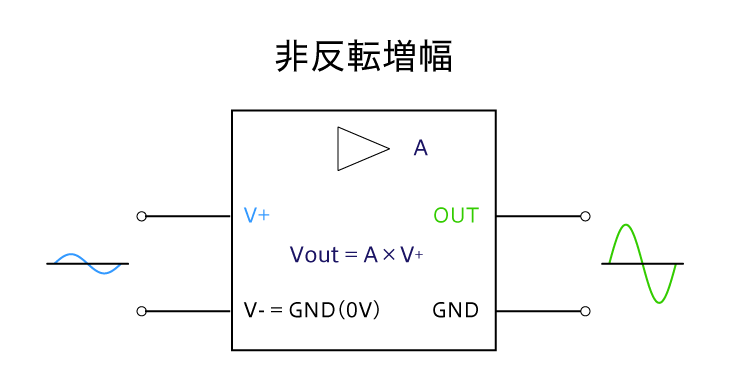
$$ V_{out} = A \times ( V_{+} – 0 ) \\ = A \times V_{+} $$
これで、入力信号をA倍した出力信号をえられる、非反転増幅となる。
では、V+にGND(0V)を接続するとどのようになるか。
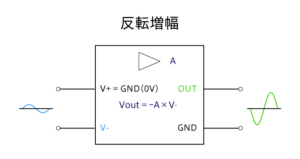
$$ V_{out} = A \times ( 0 – V_{-} ) \\ = A \times ( – V_{-}) $$
となることから、入力と出力が反転する、反転増幅となる。
オペアンプ
演算増幅器・オペアンプ
差動増幅回路の増幅率は、どのようにして決定するのだろうか。もちろん任意の利得の増幅回路を作成することもできるが、負帰還増幅回路と同じように、充分に利得の高く特性の良い差動増幅器を作り、外部に減衰器を取り付けることで、利得を固定することができる。それは、式(2)と式(8)を比べるとわかる。式(2)のViは、差動増幅器のΔViと同じであることから、差動増幅器のV+に入力電圧Vinを印加し、V-に減衰回路(β回路)を取り付けると任意の利得の増幅回路を作成できる。 このように、差動増幅器の利得を充分に高くした増幅回路を一つのパッケージに収めたICがオペアンプである。また、単純な増幅回路のみならず、加算・減算・乗算などの計算をアナログ回路でできることから、演算増幅器と呼ばれている。
仮想短絡
反転増幅回路を考えたときに、V- と V+ の入力が常に一致するように出力電圧が決定します。差動増幅回路であるため、ずれていると差分が増幅して出力され、フィードバック抵抗を通してV-に戻されるためである。この状態を一見するとV+ とV- の両方の入力端子間に電流が流れない(インピーダンスは∞)であるのに、短絡している(ショートしている)ように見える。このことを、バーチャルショート(仮想短絡・Virtual Short)やイマジナリショート(Imaginary Short)と呼ばれる。また、V+ の端子をGND(0V)に接続している場合を特別に仮想接地と呼び、アナログ演算や変換を行うときの基本となる。
関連記事